Mechanical Compliant Systems
| 1980 | 1990 | 2000 | 2010 |
| Emerging of PCs | Information superhighway | Human-center healthcare robotics |
| [Numerical] [Damping Identification] [Mechanism Design] [References] |
Biomechatronics
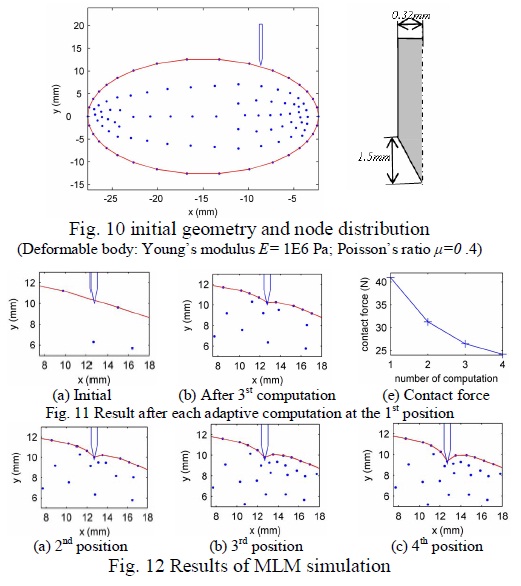
Adaptive MeshLess Method (MLM) for Deformable Contact Analysis
 Growing
new robotic applications in agriculture, food-processing, assisted surgery
and haptics, which requires handling of highly deformable objects, present a
number of design challenges; among these are the needs
to develop methods to analyze deformable contacts.
Although FEM meshes provide the generality to handle complicated
geometries, appropriate mesh structures are often difficult to be created or
modified especially for applications (such as the process of needle
insertion) where meshes must be reconstructed automatically during the
computational process. The accuracy of FEM depends significantly on
the quality of its mesh Additionally, the mesh density must be
maintained at a sufficiently high level around the contact region to obtain
reasonably accurate results. However, additional elements in non-contact
regions do not generally help improve the overall accuracy.
Growing
new robotic applications in agriculture, food-processing, assisted surgery
and haptics, which requires handling of highly deformable objects, present a
number of design challenges; among these are the needs
to develop methods to analyze deformable contacts.
Although FEM meshes provide the generality to handle complicated
geometries, appropriate mesh structures are often difficult to be created or
modified especially for applications (such as the process of needle
insertion) where meshes must be reconstructed automatically during the
computational process. The accuracy of FEM depends significantly on
the quality of its mesh Additionally, the mesh density must be
maintained at a sufficiently high level around the contact region to obtain
reasonably accurate results. However, additional elements in non-contact
regions do not generally help improve the overall accuracy.
Li and Lee [1] extended the adaptive MLM (automatically inserting nodes into large error regions) for solving contact problems. In [1], the sliding line algorithm with the penalty method was employed to handle contact constraints; it does not rely on small displacement assumptions and thus, it can solve non-linear contact problems with large deformation. As presented in [1], these analytical methods have a number of applications beyond natural object handling for which the paper was motivated; for example, analysis of force controlled surgical incision or needle insertion. (See figure on the right, more details can be found in [1]).
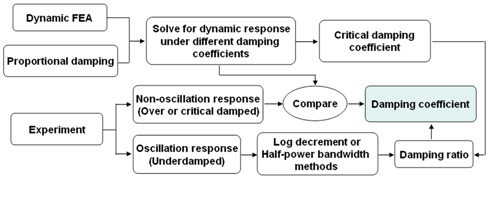
Explicit FEM for Dynamic Modeling of Damping Effects in Highly Damped Compliant Finger
Compliant mechanisms transfer force, motion and energy through elastic deformations offering several advantages in food-product handling where designs must accommodate a limited range of object sizes/shapes. Most analyses of compliant mechanisms base primarily on pseudo-rigid-body models, which treat flexible members as rigid links with compliant pin-joints to approximate the force-deflection relationship. However, these existing models are often inadequate to analyze the dynamic performance of a compliant mechanism with large deformation, contact nonlinearity and complex 3D geometries.
 Dynamic FEA
reduces physical tests and design cost/time However, two major
challenges must be overcome when used to analyze problems involving highly
damped fingers and/or deformable contact; computational stability and
damping identification. Paper [2] conducted a parametric study on
computation time of an explicit-FEA method for analyzing a compliant
multibody dynamic system (CMDS) with highly damped fingers. Paper [3]
offers a coupled experiment/computation method (that relaxes some
limitations in traditional methods generally valid for systems with an
oscillatory response) to account for the damping effect. The methods
have been experimentally validated by comparing computed results against
published data.
Dynamic FEA
reduces physical tests and design cost/time However, two major
challenges must be overcome when used to analyze problems involving highly
damped fingers and/or deformable contact; computational stability and
damping identification. Paper [2] conducted a parametric study on
computation time of an explicit-FEA method for analyzing a compliant
multibody dynamic system (CMDS) with highly damped fingers. Paper [3]
offers a coupled experiment/computation method (that relaxes some
limitations in traditional methods generally valid for systems with an
oscillatory response) to account for the damping effect. The methods
have been experimentally validated by comparing computed results against
published data.
|
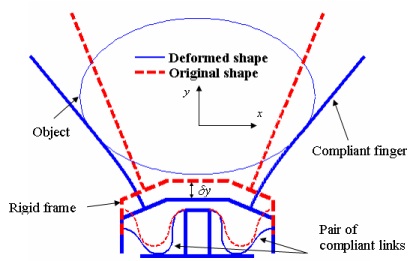
Analysis Methods for Design of Compliant Mechanisms Motivated by the need to accommodate a limited range of size/shape variations and some natural reactions encountered in handling live natural objects, Lan and Lee [4] developed an alternative Generalized Shooting Method (GSM) formulation along with two numerical solvers as a relatively complete framework for analyzing compliant mechanisms, which allows for flexible links with nonlinear material properties and/or non-uniform cross-sections. Lan and Lee [5] extended their studies on compliant mechanisms to include mechanical contacts, they have offered a systematic method for designing compliant fingers, and a formulation based on nonlinear constrained minimization to analyze contact problems of compliant fingers. The analysis method has a number of applications beyond food processing for which the paper was motivated and has an immediate impact; for example, 3D assembly of micro-components where various micromachining techniques are only capable of two-dimensional fabrication and where the interest to reduce the complexity of micro-assembly has motivated the development of passive microgrippers. The method introduced here can help practical designers predict the essential contact forces and deflected finder shape, and choose appropriate finger dimensions without costly prototyping iterations. |
 |
 |
Traditional designs that base methods solely on numerical analysis have certain limitations particularly for applications where direct intervention (of a designer, operator or user) requiring human experience (or knowledge) is unavoidable. In paper [7], a Haptic Device API was proposed in the design of a snap-fit enabling the designer to feel the feedback force in real-time. More recently, paper [8] simulated the snap-fit disassembly, where a ball-joint-like spherical motor was incorporated as haptic device, offering smooth multi-DOF force/torque feedback to allow for more realistic simulation of the human motion.
-
Li, Q. and K.-M. Lee, "An Adaptive Meshless Method for Modeling Large Mechanical Deformation and Contacts," ASME Journal of Applied Mechanics. July 2008, vol. 75, issue 4, pp. 1207-1212.
-
Liu, C.-H. and K.-M. Lee, “Explicit Finite Element Analysis of a Flexible Multibody Dynamic System with Highly Damped Compliant Fingers,” IEEE/ASME AIM 2010, Montreal, Canada, July 6-10, 2010, pp. 43-48.
-
Liu, C.-H. and K.-M. Lee, "Dynamic Modeling of Damping Effects in Highly Damped Compliant Finger for Applications involving Contacts," accepted to appear in ASME Journal of Dynamic Systems, Measurements and Control.
-
Lan, C.-C. and K.-M. Lee, "Generalized Shooting Method for Analyzing Compliant Mechanisms with Straight and Curved Members," ASME J. of Mechanical Design. July 2006, vol. 128, pp. 765-775.
-
Lan, C.-C. and K.-M. Lee, "An Analytical Contact Model for Design of Compliant Fingers," ASME J. of Mechanical Design. January 2008, vol. 130, issue 1, pp. 011008-1-011008-7.
-
Lan, C.-C., K.-M. Lee and J.-H. Liou, "Dynamics of Highly Elastic Mechanisms Using the Generalized Multiple Shooting Method: Simulations and Experiments Mechanism and Machine Theory," Mechanism and Machine Theory. 2009 , vol. 44, issue 12, pp. 2164-2178.
-
Ji, J. J., K.-M. Lee and S. Zhang, “Cantilever Snap-fit Performance Analysis for Haptic Evaluation,” ASME J. of Mechanical Design, December 2011, Vol. 133, 121004-1~8.
-
Bai, K., J, J. Ji, K.-M. Lee and S. Y. Zhang, A Two-mode Six-DOF Motion System based on a Ball-joint-like Spherical Motor for Haptic Applications
Professor Kok-Meng Lee
George W. Woodruff School of Mechanical
Engineering
Georgia Institute of Technology
Atlanta, GA 30332-0405
Tel: (404)894-7402. Fax: (404)894-9342. Email:
kokmeng.lee@me.gatech.edu
http://www.me.gatech.edu/aimrl/